|
|

|

|
| e-Pub |
Section: New Results
RFID for pervasive computing environments
Participants : Nebil Ben Mabrouk, Frédéric Weis, Paul Couderc [contact] .
Here the principle is to implement distributed data structure over a set of RFID tags, enabling a complex object (made of various parts) or a set of objects belonging to a given logical group to "self-describe" itself and the relation between the various physical elements. Some applications examples includes waste management, assembling and repair assistance, prevention of hazards in situations where various products / materials are combined etc. The key property of self-describing objects is, like for coupled objects, that the vital data are self-hosted by the physical element themselves (typically in RFID chips), not an external infrastructure like most RFID systems. This property provides the same advantages as in coupled objects, namely high scalability, easy deployment (no interoperability dependence/interference), and limited risk for privacy. However, given the extreme storage limitation of RFID chips, designing such systems is difficult:
-
Data structures must be very frugal in terms of space requirements, both for the structure and for the coding.
-
Data structures must be robust and able to survive missing or corrupted elements if we want to ensure the self-describing property for a damaged or incorrect object.
In the context of RFID system, the resiliency property of such data structures enables new information architecture and autonomous (offline) operation, which is very important for some RFID applications. We previously applied the self-describing objects approach to the waste management domain, which has shown to be a specially challenging situation for RFID. This challenge is found more generally in pervasive computing scenarios involving RFID reading in uncontrolled environments (see section 4.4).
We achieved the following results:
-
We showed the importance of diversity in the context of challenging RFID reading. A reconfigurable antenna was designed to support dynamic reading protocols.
-
A software approach based on error correcting code was developed to support robust data storage in groups of RFID.
-
An innovative RFID testbed for experimenting a large range of RFID situations/applications was operational (minus some features to be completed), supported by a simulation environment and a control environment.
-
A patent was filed and some contacts made with RFID companies.
However, the supports for implementing dynamic reading protocols were lacking, both on the software and the radio side. The following further progress were made:
-
The four elements diversity antenna designed in first phase was implemented.
-
The control software has been greatly improved. A new environment was designed, offering powerful and flexible programming capabilities for easy prototyping of RFID reading scenarios and collecting experiments results. A simulator of the testbed was also developed, allowing off-site developments. This work is supported by the RFID-Lab ADT.
-
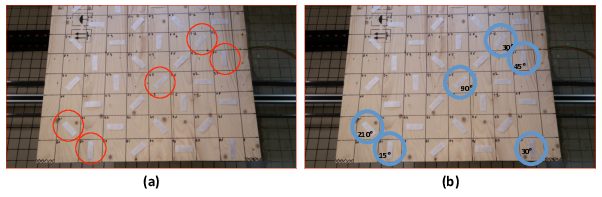
Motion-induced improvements of RFID reliability were experimented, as shown below in Figure 4.
-
A significant dissemination efforts toward the industry was made, and we have good hope that some of the contacts will lead to perspectives.
An example of motion-assisted RFID readings implemented is shown in figure 4: a matrix of 32 RFID tags are arranged in reduced power conditions, so that the tags are near their sensivity limit. In such conditions, 20% of the tags failed to be read by the reader. By coupling the reading with a rotation of 210 deg, we show that all the missing tags are progressively recovered.